本文共 4300 字,大约阅读时间需要 14 分钟。
系列文章目录
本文针对模糊操作由浅入深做原理及代码解析。
文章目录
模糊
模糊是什么
在学习之前,必须要清楚的是模糊是什么?说得最直观一点就是,假设一个人是600度的近视,他离另一个人2米时,戴眼镜时看到的图像转化到不戴眼镜时看到的图像就是模糊的过程。
但是在计算机视觉领域,我们不能从人的感观来说。 模糊,属于低通滤波的一种,它称为模糊,也可以称为平滑。 低通滤波是一种信号过滤方式,指的是低频率的信号可以通过,而超过设定界限的信号会被阻断,减弱等等。 从直观来看: 右图至左图的操作就叫模糊。
右图至左图的操作就叫模糊。 模糊操作的原理
对一个图像来说,从OpenCV角度分析,它无非就是一个三维的矩阵,每一维的每一个元素,代表在这个色彩维度的亮度,那么我们不难想象,对于一张图像而言,如果两个像素点的数值大小处于极大极小的极端,那么对比就会很明显,比如255和0,白和黑一眼分明,但是如果很相近,比如122和123那么就很像,换句话来说,这块的图像就很平滑。模糊操作其实就是让图像变得很平滑,一旦很平滑,那么图像就会失去原先的棱角分明,所以看着就没有原先的清楚。那么实现的话其实也没有很困难是吧,最简单的实现,就是我们从最开始的像素点开始两个两个遍历,并不断的赋予均值,对每个像素点进行改变,但是那种模糊已经让图像失去了原先的价值,所以OpenCV内部提供的模糊操作API远远没有那么简单。但是这种模糊方式作为原理介绍就很容易明白。
基于离散卷积的模糊
图像的卷积操作:卷积这个概念应该在深度学习中比较好理解。我们可以举个简单的例子来说说。另外,这里我们需要谨记一句话:对图像来说,越卷越平滑。
对如下一行数据做卷积 我们给定卷积核为2的1*3的矩阵如下
我们给定卷积核为2的1*3的矩阵如下  卷积过程如下: 对于第一个数据和最后一个数据,直接就保留原数据,卷积核从第二个数据开始计算。 用代码算:
卷积过程如下: 对于第一个数据和最后一个数据,直接就保留原数据,卷积核从第二个数据开始计算。 用代码算: a_list=[12,13,15,15,16,71,14,15,56,47]b=[1,2,1]c_list=[12]for i in range(1,9): c_list.append((b[0]*a_list[i-1]+b[1]*a_list[i]+b[2]*a_list[i+1])//4)c_list.append(47)print(c_list)

对于像素点的卷积计算只需要泛化到相应的维度就可以了,这里就不细说了,原理大概明白就够了。ok,接下来直接调用API看效果。
均值模糊
均值模糊:对邻近选定的像素点做卷积,求均值。
import cv2 as cvimport numpy as np#均值模糊 使图片模糊def get_mean_burry(image): cv.imshow('iamge',image) dst=cv.blur(image,(5,5)) cv.imshow('burry',dst)src=cv.imread('ky_1.jpg')get_mean_burry(src)cv.waitKey(0)cv.destroyAllWindows() 结果如下:
 重点方法解析:dst=cv.blur(image,(5,5))
重点方法解析:dst=cv.blur(image,(5,5)) cv2.blur(image,kernel_size)
image:原图 kernel_size:卷积核尺寸
这里如果假设为33,其实就是一个,那么55也很容易想的来
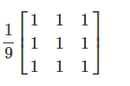 这样的矩阵,通过前面的知识,相同的算法,可以重新计算出一些简单图片的像素点做对比。
这样的矩阵,通过前面的知识,相同的算法,可以重新计算出一些简单图片的像素点做对比。 中值模糊
中值模糊,其实就是选定一个范围内的像素点,排序后选出中值,之后填入中心像素点中。借知乎的图:鸣谢
 代码如下;
代码如下; import cv2 as cvimport numpy as np#中值模糊可以抹除椒盐噪点。def get_mid_blurry(image): cv.imshow('noise',image) dst=cv.medianBlur(image,5) cv.imshow('no_noise',dst)src=cv.imread('ky_1.jpg')get_mid_blurry(src)cv.waitKey(0)cv.destroyAllWindows() cv.medianBlur(image,5),参数很容易解释:image为原图,5表示选取邻域的大小,这里指的是以该像素点为中心5为边长的正方形。所以这里的参数为奇数。
自定义模糊
代码:
import cv2 as cvimport numpy as np#自定义模糊def get_customer_burry(image): #定义卷积核,算子 #该方法与均值模糊 5*5的卷积类似 #kernel=np.ones([5,5],np.uint32)/25 #kernel=np.array([[1,1,1],[1,1,1],[1,1,1]],np.float32)/9 #image=np.float32(image) #卷积的锐化算子 kernel=np.array([[0,-1,0],[-1,5,-1],[0,-1,0]],np.float32) dist=cv.filter2D(image,-1,kernel=kernel) cv.imshow('customer',dist) cv2.filter2D():使用自定义内核对图像进行卷积,它不仅可以让图像变得模糊,还可以让图像变得更锐化。该方法的使用花样很多,这里不细说,-1参数代表所需要的的深度,这里是默认。kernel表示卷积核。可以记住这种方法,一般的模糊和锐化不会改动其他地方,最大的改动应该就是自己定义的卷积核,这里几种都写在代码里面了。
高斯模糊(重点)
高斯模糊属于均值模糊的一种,可以说是一种特殊的均值模糊,虽然它的名字听上去有点恐怖,但是实际上高斯模糊是一种没有很难的数学算法。其实说白了它的操作只有几步:利用高斯分布求高斯掩膜,之后利用高斯掩膜操作图像。这里我们需要从高斯分布开始说起。
高斯分布是概率论中的内容,可能有一些伙伴学习过概率论,当然可有一些朋友没有学过概率论,不过无所谓。
高斯分布
高斯分布又称正态分布。如下为高斯分布概率分布图。以及高斯分布的计算公式

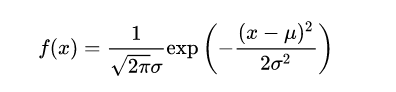
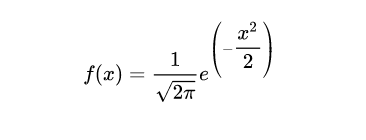
μ指均值,σ指标准差,当μ=0,σ=1时为标准正态分布,公式如下:
高斯模糊
而我们要做的高斯模糊,其实是通过一个高维的高斯分布计算高斯掩膜的,而且是在基于μ=0的基础上做的,因为,每次计算都要从选定像素点计算,因此可以直接忽略μ,我们从简单一维的角度分析对如下的坐标。
 做向量计算(x1-x2) ^2+(y1-y2) ^2并求平方2,得到。
做向量计算(x1-x2) ^2+(y1-y2) ^2并求平方2,得到。 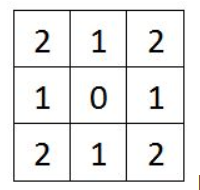
令σ为1,取高斯分布的值。
如下: 之后对表格进行归一化,即同除以之和。
之后对表格进行归一化,即同除以之和。  这就是所谓的高斯掩膜了,高斯掩膜只与σ有关,关于证明的话,有兴趣的话小伙伴可以自己动手算一下,它与xy是没有关系的,因为xy会被抵消的。 接下来我们看代码:
这就是所谓的高斯掩膜了,高斯掩膜只与σ有关,关于证明的话,有兴趣的话小伙伴可以自己动手算一下,它与xy是没有关系的,因为xy会被抵消的。 接下来我们看代码: #加载图像 利用循环遍历加载高斯噪声 利用API去除高斯噪声 代码方面应该差不多了,接下里是原理及博客了。import cv2 as cv import numpy as np#加载图像def load_image(): src=cv.imread('ky_2.jpg') return src#处理超限def clip(num): if num>255: return 255 elif num<0: return 0 else: return num#放置高斯噪声def gaussian_image(image): h,w,ch=image.shape for i in range(h): for j in range(w): #随机矩阵 1*3 s=np.random.normal(0,20,3) image[i,j,0]=clip(image[i,j,0]+s[0])#blue image[i,j,1]=clip(image[i,j,1]+s[1])#green image[i,j,2]=clip(image[i,j,2]+s[2])#red return image#利用API去噪def clear_noise(image): dst=cv.GaussianBlur(image,(3,3),2,2) return dst#展示def show_and_time(): src=load_image() cv.imshow('image',src) t_1=cv.getTickCount() noise=gaussian_image(src) cv.imshow('noise',noise) dst=clear_noise(noise) cv.imshow('dst',dst) t_2=cv.getTickCount() print('time {0:.2f} ms'.format((t_2-t_1)/cv.getTickFrequency()*1000)) cv.waitKey(0) cv.destroyAllWindows() show_and_time() - numpy.random产生随机矩阵。
- 两个计时函数,之前的博客写到过,这里是提一下。
- 对超出范围的数字要做处理,否则会出问题。
numpy.clip方法,可以代替如下的控制范围的函数,并且clip方法是用向量计算,因此效率更高,可替换为np.clip(x,0,255)效果为对于x向量中所有的元素,控制在0~255范围之间。
重点方法:cv.GaussianBlur(image,(3,3),2,2)cv2.GaussianBlur(src, ksize, sigmaX[, dst[, sigmaY[, borderType]]]) → dst
src为原图。这里的第一个2是sigmoidX,第二个2是sigmoidY,他们的作用是产生两个一维的卷积核在行和列处做卷积。(3,3)为卷积核尺寸,上面已经解释过。效果如下:

转载地址:http://jkcki.baihongyu.com/